

在安川机器人编程中,Mframe指令用于通过示教三个特征点来建立用户坐标系(User Coordinate System),方便在特定工件或工位的局部坐标系下进行作业编程(如焊接、搬运等)。用户坐标系是相对机器人基坐标系或工具坐标系的自定义坐标系,能简化路径示教(尤其当工件与机器人基坐标不平行时)。
一、用户坐标系的构成与Mframe原理
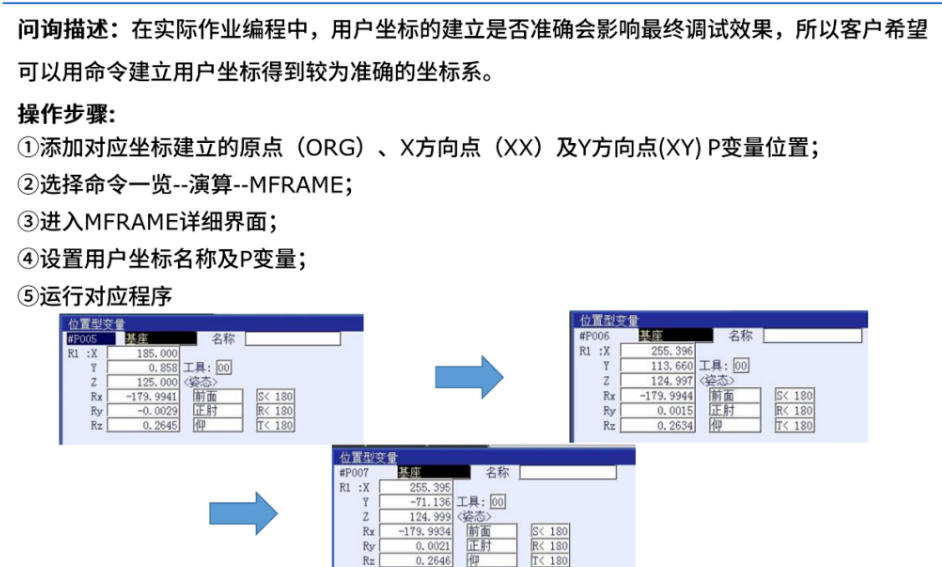
用户坐标系需定义 3 个关键参数(通过 3 个示教点确定):
Mframe指令通过读取这三个示教点的位置数据,自动计算并生成用户坐标系参数(原点坐标、各轴方向向量),并将其存储到指定的用户坐标系编号(如 U1~U8,不同控制器支持数量可能不同)。
二、使用Mframe指令建立用户坐标系的步骤(以 DX200/YRC1000 为例)
1. 准备工作
2. 示教三个特征点
在机器人作业程序(JOB)中,先示教定义用户坐标系所需的 3 个点(P0、P1、P2):
plaintext
; 示例:示教用户坐标系U1的三个点 P0: J P[0] 100% FINE ; 示教原点(如工件左下角顶点) P1: J P[1] 100% FINE ; 示教X轴方向点(从P0沿工件长边移动一段距离) P2: J P[2] 100% FINE ; 示教XY平面点(从P0沿工件短边移动一段距离,确保与P1不共线)
3. 执行Mframe指令生成用户坐标系
在程序中调用Mframe指令,指定用户坐标系编号及三个示教点,格式如下:
plaintext
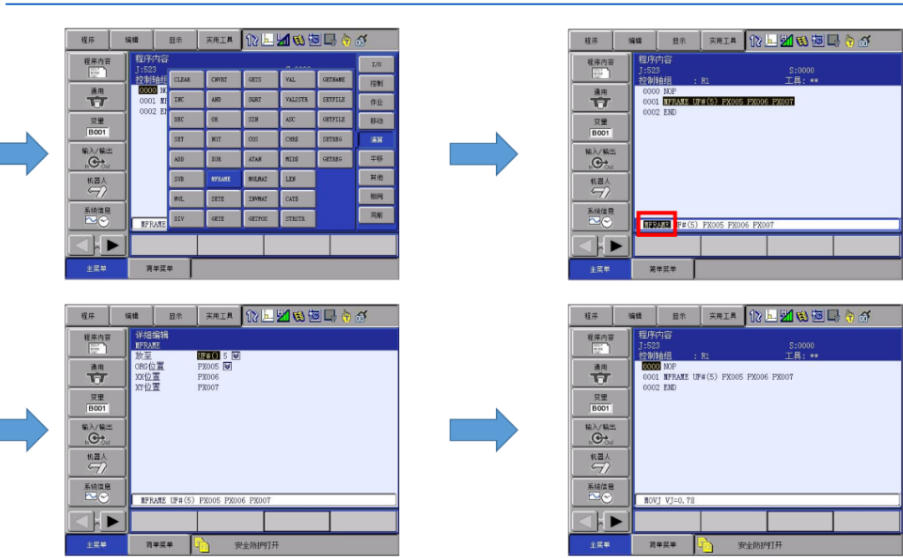
Mframe U<编号>, P<原点>, P<X轴点>, P<XY平面点>
示例程序:
plaintext
; 用P[0]、P[1]、P[2]建立用户坐标系U1 Mframe U1, P[0], P[1], P[2]
4. 确认与验证坐标系
三、注意事项
通过Mframe指令建立用户坐标系后,后续编程可直接在该坐标系下示教路径(如J P[3] U1),大幅简化斜向工件或复杂工位的编程难度。
